Vehicle imaging technology is a technology and method for placing imaging equipment on a vehicle platform for long-distance, non-contact acquisition of target images, and is the key to intelligent vehicles in the future. However, the output image sequence is unstable due to the camera shaking with the vehicle body, and the large amount of image sequence shaking can easily cause observer fatigue and also seriously affect the accuracy of subsequent processing. Therefore, the vehicle image sequence must be stabilized. At present, vehicle-mounted image stabilization technology uses more algorithms for the feature point method and the gray projection method. The feature point method can perform motion vector estimation on any form of image motion, but when dealing with some images with poor quality and poor characteristics, the accuracy is often very low, and it is difficult to adapt to various environmental changes of vehicle video stabilization; grayscale The projection method can only deal with the case of only translational motion and small rotational motion, and requires a certain contrast of the image. The on-vehicle video is often shot in complicated road conditions, such as rain and fog, which greatly affects the accuracy of the algorithm processing. In view of this situation, this paper uses wavelet method to preprocess the image to improve the anti-interference ability of the gray projection method in the image stabilization application of the vehicle. 1 Block diagram of vehicle image stabilization system Electronic image stabilization is a method of combining electronic equipment and digital image processing technology, by calculating the motion vector of the selected reference frame image and the current frame image to be compared, and then according to the obtained motion vector according to some criteria for the current image Compensation, thereby eliminating or reducing random jitter between frames of the image sequence, to obtain a stable image sequence. Electronic image stabilization is the core part of the vehicle image stabilization system, and its system structure is shown in Figure 1. Figure 1 System block diagram Among them, global motion vector estimation is the key to the entire image stabilization system, which determines the image stabilization accuracy and time-consuming. 1.1 Motion vector estimation algorithm By analyzing the characteristics of highway jitter and comparing the advantages and disadvantages of the current commonly used motion estimation algorithms in electronic image stabilization, this system decided to use the gray projection algorithm for global motion vector estimation. Gray-scale projection algorithm: The projection method is a method that uses the overall gray-scale variation of the image to determine the image motion vector. It does not need to perform correlation operations on each point on the image, but uses the gray-scale projection curve of the image to perform a correlation operation. Therefore, its calculation amount is small, the motion estimation speed is fast, it is easy to meet the real-time requirements, at the same time, the ability to suppress noise is strong, and it can also meet the requirements in accuracy. The algorithm first maps each frame of two-dimensional images into two one-dimensional waveforms through a projection formula, and the cumulative gray value of its rows and columns is expressed as: In the formula: Ik (i) represents the gray value of the ith row of the image of the kth frame, Ik (i) represents the gray value of the jth column of the image of the kth frame, and Gk (i, j) is the image of the kth frame ( The pixel gray value at i, j). In order to avoid the change of the image edge information caused by the image jitter, which affects the peak of the cross-correlation curve calculated by the cross-correlation, before the cross-correlation calculation, the image is cosine filtered to remove the image boundary information waveform and the central region waveform is completely retained. The influence of small boundary information on the cross-correlation calculation improves the calculation accuracy. After the projection filtering, the two curves of each component of the reference frame and the current frame are correlated to find the unique valley value of the two curves, and the movement offset of the current frame relative to the reference frame can be determined. The formula for related operations is: Where: colc (n) and colr (n) are the gray projection values ​​of the i-th frame and the reference frame in one direction, J is the unit length of the correlation operation in the two curves, m is the displacement vector relative to the reference The search width of the frame on one side, that is, the maximum allowable positive and negative jitter range, m takes a value between 1 and 2m + 1. When C (k) is the minimum value, and k = Kmin at this time, the displacement vector of the i-th frame image relative to the reference frame image in one direction is: Taking the horizontal direction as an example, when vi is positive, it indicates that the current frame has moved | vi | pixels to the right relative to the reference frame; when negative, it indicates that it has moved | vi | pixels to the left. In the same way, the displacement vector in the vertical direction can be obtained.
LED Solar Street Lighting System
LED Street lighting is a fresh new alternative to traditional street lamps such as: LPS, HPS, or MH street lights.
* Advantages of Our LED Solar Street Lighting Projects: 60W Solar Street Lights,60W Solar Street Lighting,Solar Led Street Light 60W,Solar Led Street Light Outdoor Yangzhou Bright Solar Solutions Co., Ltd. , https://www.cnbrightsolar.com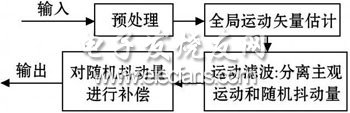
![]()
LED lighting provides a multitude of advantages over conventional incandescent lights:
1). Green Energy, Lower Power Consumption, Save 60%-80% Than Others.
2). Higher power, higher brightness intensity, Good Color Rendition.
3). Save electricity cost. Save electric transformer and cable cost. Free maintenance
4). Environmental Impact - Eliminate Hazardous Disposal, Low Light Pollution, No Radiation.
5). Longer lifetime: Between 80000-100000 Hrs. If lighting 12 hrs/night, could use at least 12 - 22 Years
6). Less heat Generated compared to other sources,
7). Downward orientation of Light, could adjust lighting angles and lighting range and shape on the Ground to meet the road-Rectangular. Other lighting source just could give common round shape and small lighting range.