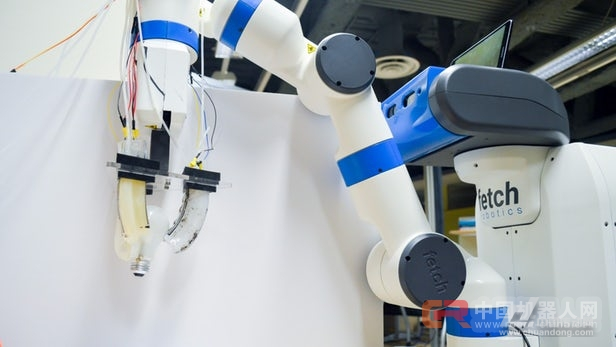
According to foreign media reports, an engineering team at the University of California, San Diego, recently created a flexible robotic grip that can "feel" the shape of objects. It can construct virtual 3D models of objects by touching them and then continue to operate these items accordingly. Typically, robots need to see the objects they grab through the camera, or they need to be trained to grasp the object. This means that dark conditions may be challenging. The new robot gripper is different because it can be touched to determine the three-dimensional shape of unfamiliar objects. It uses three pneumatic fingers, each of which is covered by a sensing "skin" consisting of a flexible silicone with embedded carbon nanotubes. When one of the fingers is in contact with the surface of one of the objects, the air pressure in the fingers increases at that position. The increase in pressure causes the conductivity of the nanotubes in this area to change. When the robot grabs the “feel†of the shape of the object, a series of electrical signals are transmitted from the finger to the control panel that creates the virtual 3D model. Once the robot gripper has established the overall shape of the item, it can grasp it and manipulate it. The robot gripper can even perform a twisting motion by selectively inflating one or more "air chambers" within each finger - this allows it to tighten the bulb and the like. The technology was developed by a team led by Michael T. Tolley and the research was recently presented at the International Conference on Intelligent Robots and Systems held in Vancouver. Plug-In Connecting Terminals,Insulated Spade Terminals,Cable Connector Double Spade Terminals,Vinyl-Insulated Locking Spade Terminals Taixing Longyi Terminals Co.,Ltd. , https://www.longyiterminals.com